Shall we stop structural modifications of low-frequency floors to achieve their vibration serviceability?
A blog post by Aleksandar Pavic
Vibration performance of low-frequency building floors responding to human-induced footfall dynamic loading, better known as walking, is worldwide by far the most widely considered vibration serviceability requirement. It has rightly become a standard design scenario since it is by far the most frequent cause of the growing number of reported problems with floor vibration serviceability.
The Problem with Damping and Mass.
For low-frequency floors, all guidelines invariably assume that human walking can cause resonance in which the calculated floor acceleration response is inversely proportional to the modal damping ratio and modal mass. So it’s no surprise that the crucial question when checking floor vibration is: what is the damping ratio? This is accompanied by a usual scramble for any shred of published or other evidence to assume a higher damping ratio and reduce the calculated response. If the damping ratio of a resonating mode can be increased from, say, 1.5% to 2.5%, the calculated vibration response will be reduced by a whopping 40%! A previously failing floor now passes with flying colours.
Interestingly, similar questions are not usually asked about the other equally important modelling parameter – modal mass. Modal mass values are generated by a formula or computer modelling, so it’s perceived to be more ‘reliable’ and less questionable. Modal mass comes from a calculation whereas the modal damping ratio gets assumed based on guidelines and experience. So, there is a perception that the modal damping value is more ‘flexible’ than its modal mass counterpart when it comes to calculating resonant response.
However, those who – like me – spent their professional lives not only modelling but also – whenever possible – testing full-scale floors (and comparing the two sets of data) know that modal damping ratio and modal mass are together also the two most unreliable floor vibration modelling parameters. Moreover, they are quite difficult to measure and correlate with their counterparts assumed in the calculations. Hence, every time I use the assumed value of modal damping ratio and the calculated value of modal mass to get the floor’s resonant response I am worried about how different they could be in reality after the floor is constructed. Yet, as nothing better is available, we all keep using them in a calculation procedure that is highly sensitive to their values.
Other Problems.
This is not the only source of considerable uncertainty in the calculations of floor resonant vibrations under footfall loading. I tested an open plan floor in service with as many as 120 people working where as usual, the calculation formulae assume that only a single person is walking and causing resonance, no matter how statistically (un)likely that is! Everybody knows occupants in such offices frequently walk simultaneously and very close to each other, very possibly causing greater responses than an individual walker. The footbridge design guidelines moved on from a single person walking model to groups and crowds walking simultaneously. They also introduced the likelihood of the pacing frequencies matching the natural frequency many years ago. However, the floor design guides are still sticking with the approach from 30-40 years ago despite obvious unwarranted assumptions. The logic has been that one wrong assumption (resonance due to footfall is regularly achieved, overpredicting responses) will be cancelled by another wrong assumption (multiple pedestrians are neglected, underpredicting responses) and it will be ok in the end. Pass-fail criteria suitable for ultimate limit state calculations still prevail in floor vibration serviceability assessment where a more nuanced and informed probability-based approach of what is likely to happen in day-to-day operation is preferable.
Moreover, the presence and stiffening effect of non-structural partitions on the vertical motion of lightweight and long-span low-frequency floors is regularly ignored for two reasons: stiffness of partitions is uncertain thus difficult to model and their layout may change with the change of a tenant. The floor finite element models are normally ‘bare’ with the effect of its partitions modelled as increased modal damping ratio and increased physical mass of the floor. There is a perception that partitions generally help reduce vibrations, so it is ‘safe’ to assume that they are not there. Although this may be true in the partitioned areas of the floor, my and my researchers’ experience is that the presence of partitions tends to localise mode shapes thus significantly decreasing modal mass while not increasing much natural frequency of dominant modes of vibration in the not partitioned part of the floor. There are many millions of m2 of floors designed in the UK and worldwide on the assumption that the performance of the unpartitioned area of the finished floor is the same as that of the bare floor assumed in the analysis. It is not – in fact, it is potentially much worse.
The effect of more realistic modelling of the features which may affect floor vibration performance is illustrated on two contour plots below. A vibration serviceability assessment has been carried out for 3×3 composite steel-concrete floor panels (each being 9m wide and 14m spanning) forming a floor plate of over 1000m2. The floor plate was modelled: 1) as ‘bare’ with no openings and no partitions explicitly modelled (contour plot of R-factors on the left) and 2) with realistic openings pertinent to lift cores and stairwells (modelled by vertical pin supports around the edges of the openings) and partitions explicitly included as vertical springs along the white dashed lines (contour plot on the right). Recently published AISC recommendations for stiffness modelling of the partitions were used to model the vertical spring stiffness representing partitions.
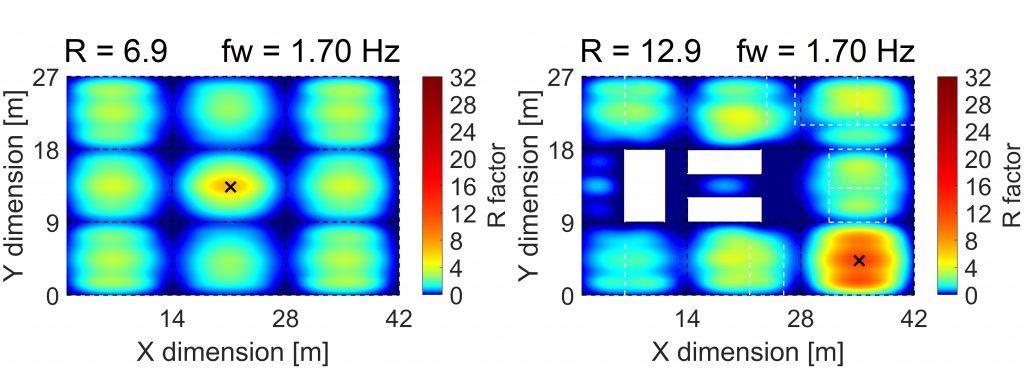
The maximum response factor occurred at the same pacing frequency for both floor models of 1.7Hz, quite common pacing for an office environment. However, the calculated R-factor almost doubled from 6.9 to 12.9 in an isolated unpartitioned area of the floor. Although the lift cores clearly stiffened the middle part of the floor plate, the bottom right corner developed localised modes with low modal mass and stiffness thus increasing the walking-induced vibration response tremendously. Stiffening the floor with lift cores and partitions does not always help everywhere on the floor, and actually may worsen the situation considerably.
This feature of accurate modelling of stiffness to include partitions in partitioned floors could be quite problematic and may explain why a quarter of colleagues complain about poor vibration performance of code-compliant floor structures, as the 2015 IStructE survey has demonstrated.
Finally, the climate emergency means that it cannot be business as usual anymore, whereby the structural engineering profession throws huge amounts of construction materials and embodied energy at managing design risk and uncertainties relating to floor vibration serviceability. Increasing the mass of the floor just to control tiny footfall-induced vibration of low-frequency floors is not a viable design option anymore.
The Big Question.
So, knowing all of this, the big question is: why do we keep designing up-front omnipresent low-frequency floor structures using uncertain structural parameters and unreliable loading models given the evidence that our approach doesn’t always work and is definitely not fit for purpose in a climate emergency? In partitioned areas of the floor the responses are easily considerably lower than calculated and in the unpartitioned areas they can easily be much higher! Adding mass and stiffness to control low-frequency floor resonance is also plain wrong, when damping is by far the most effective way of doing that. Here is a thought: how about we stop doing all of that?
The really big question is: shall we design structural floors for everything except vibration serviceability?
In this design approach, we optimise the floor structure for the minimum embodied energy while meeting strength, deflection, concrete cracking, fire, sound and thermal comfort criteria (and wherever else, just not the footfall-induced vibration criterion). We do not consider footfall vibrations at all when deciding spans and sizing structural elements. After all, what is the point designing the low-frequency floor structure for vibration serviceability when we know that:
- Significantly more (up to 100%) materials will be needed to achieve a code-compliant vibration serviceability design. This will severely impact material utilisation and destroy the green credentials of the building design knowing that more than half of the total multi-storey building mass above the ground and corresponding embodied energy is in floors.
- Even when we do design a floor structure for acceptable vibration serviceability, the uncertain damping, inappropriate footfall loading model and effect of partitions will render the design calculations meaningless when compared with what is really happening on the real floor after it is constructed.
Granted, neglecting floor vibration serviceability in structural design will result in a very slender floor which will certainly be bouncy on its own under footfall dynamic loading. We will have a safe and sustainable, but not fit for purpose floor. What then?
Well, then the floor will be constructed and partitions and other non-structural elements (installations, facade, furniture, etc.) will come in. That will certainly improve considerably the floor vibration performance in many partitioned areas, so much so that they will often become quite satisfactory but difficult to predict upfront. This is known to anybody who witnessed fitting out of an empty and rather lively floor and its transformation into a solid floor in the partitioned areas. The large non-partitioned areas of the floor are likely to remain lively requiring vibration control. However, this is likely to be just a fraction of the total floor area which would otherwise have required structural modification throughout and the many millions of tonnes of steel and concrete wasted annually worldwide.
The Answer.
A satisfactory vibration performance of the non-partitioned floor areas will be possible to achieve by using a small desktop-PC sized 60kg floor active mass damper (AMD), such as CALMFLOOR. CALMFLOOR is a world-first commercial floor vibration control solution that can be installed at short notice and with the help and support of a tenant if needed.

Often, tenants do not know how the floor will be used until they move in, and that risk is currently managed by making sure upfront that the floor is good everywhere and that costs a lot of embodied energy. However, a radically different option is to provide vibration serviceability on demand and only in the floor areas where it is needed after the fit-out and tenant’s requirements are clear. CALMFLOOR is an ideal tool for implementing that new strategy and manages the tenant’s expectation of vibration serviceability only in areas of the floor where they need it and/or where partitions do not help enough.
A single CALMFLOOR avoids spending huge carbon resources to provide vibration performance in areas of the floor where it is already achieved by other means (eg. by partitions) or is not needed. It is a totally different way of thinking about floor vibration serviceability which is provided not everywhere and not at all times, but – on-demand: only in certain areas and at certain times. These may change throughout the operational life of a building and CALMFLOOR will adapt the floor for these. In our floor example above, only one CALMFLOOR unit was needed to reduce the vibration in the bottom right corner of the floor plate to R-factor below 8. That is only one AMD per over 1000m2 of the floor area taking into account the beneficial effects of partitions. The potential savings are colossal with very little or no risk.
CALMFLOOR offers an unprecedented level of flexibility which introduces the novel concept of providing vibration performance as a brand new on-demand service to tenants and owners of low-frequency floors. The service is to demonstrably (using floor vibration sensors in the AMD unit) ensure floor vibration performance in its most lively areas as, where, and when needed. By moving around existing, removing, or adding CALMFLOOR units, the service is easy to adapt to a new tenant and their partitioning layout or specific increased or reduced vibration serviceability demand. CALMFLOOR can be bought or rented, potentially transforming the basic investment and business model for low-frequency floors: from upfront capital intensive funding to construct a fit for vibration purpose floor and pay carbon taxes for the embodied carbon to achieve it – to on-going tax-deductible expenditure to have a serviceable floor on-demand in a manner similar to having a serviceable elevator in a multi-storey building.
Compare this with the current rather wasteful and uncertain floor vibration serviceability provision by omnipresent and planet-destroying structural modification. CALMFLOOR beats it hands down.